






双目视觉

单目视觉
探测标靶

跟踪标靶
软件

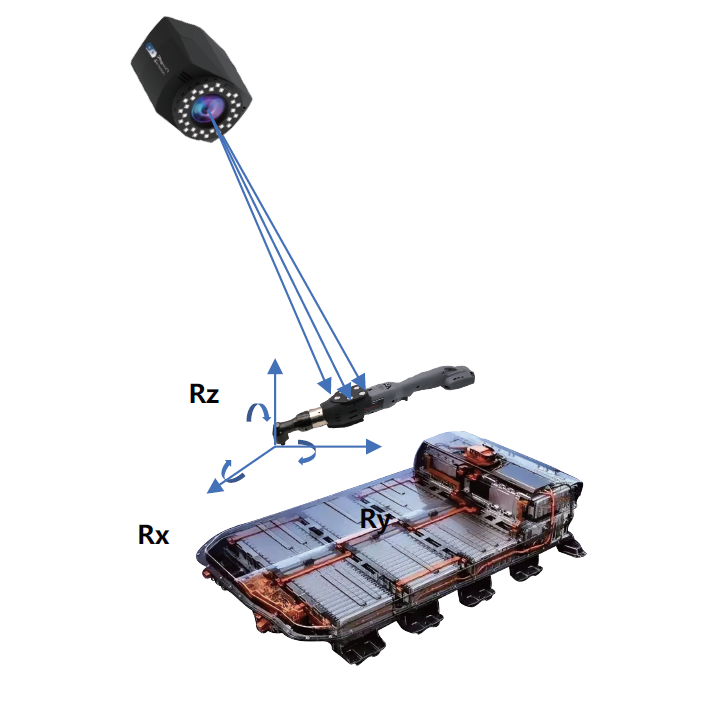
在线坐标测量

便携式坐标仪
视觉定位防错

精密装配引导

工业应用 咨询电话:13883365125
医疗应用 咨询电话:13527567357
公司邮箱:services@physoft.cn
