










汽车发动机维修行业-视觉引导系统在机器人涂胶上的应用
场景问题:发动机维修涂胶有如下特点:
- 涂胶系统的轨迹精度要求较高,需要1mm以内的轨迹精度。
- 没有待涂胶工件的3D数模,也就没有涂胶轨迹。
- 待维修发动机型号随时增加。
- 维修发动机的多样性很难用夹具固定来保证工件的定位精度。
采用方案:单目视觉系统+探测标靶+机器人坐标对齐软件
企业声音:
- 投入车间涂胶现场应用后,机器人的重复精度保证了涂胶轨迹的准确性,涂胶系统保证均匀出胶。
- 视觉引导系统适应涂胶工件的随机摆放,减少因为发动机零件的不同而产生的专用夹具设计费用、制作费用,并且减少因此而增加的维修等待周期。
- 对新零件进行涂胶轨迹示教设计后,系统自动保存轨迹,再次维修时系统直接调用涂胶轨迹。
操作者声音:系统智能学习、简单易用。快速调用原有涂胶轨迹,缩短机器人应用时间。
高精度视觉引导系统在机器人柔性加工上的应用
场景问题:机器人柔性加工有如下特点:
- 工件尺寸大,没有精确定位。
- 机器人执行铣削、钻和激光切割系统的精度要求较高,需要40μm以内的轨迹精度。
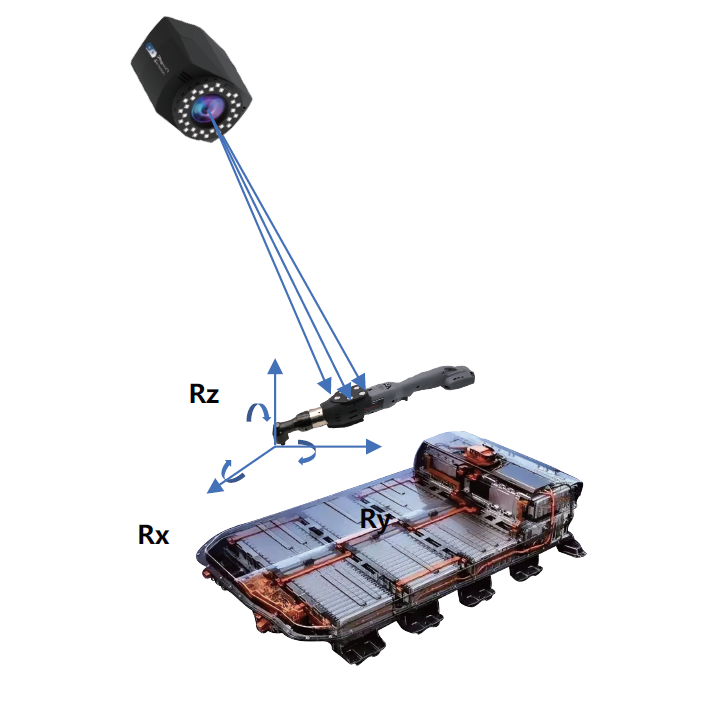
- 机器人工具中心轴线校准需要20μm的重复精度。
- 待加工工件尺寸大,没有精确定位。
- 待加工工件的加工基准非普通的平面或孔,而是如拟合轴线、拟合面等拟合几何要素。
解决方案: 双目视觉系统+机器人坐标对齐软件

