





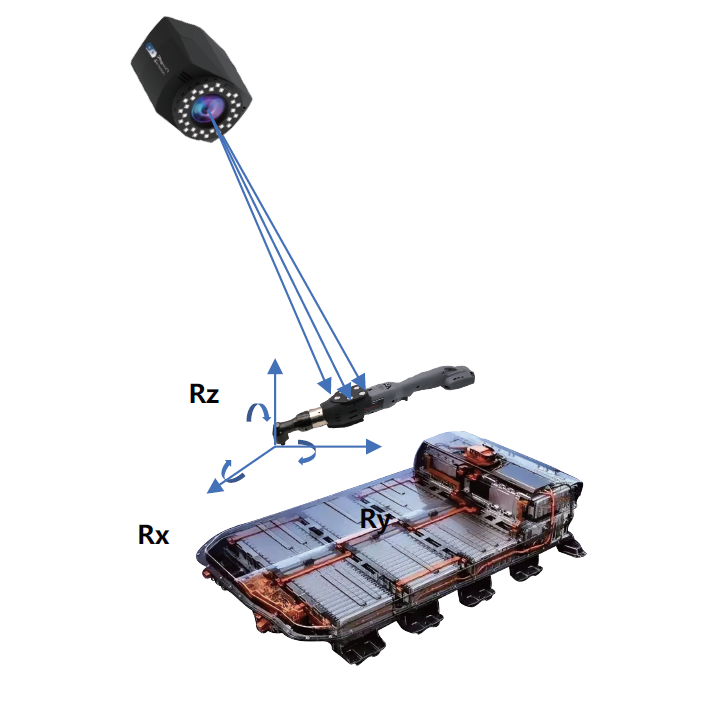







利用双目视差原理,实现全景深高精度的坐标测量和位姿跟踪。可用于便携式坐标测量跟踪、在线尺寸坐标检测、在线六自由度检测、微变形测量跟踪、盲装视觉可视化导航、高精度VR/AR、高精度机器人引导、视觉跟踪智能姿态调校和视觉引导智能装配等。
特点:
- 集成双目视觉传感器和运算控制单元,保证双视觉传感器的同步性;
- 特殊设计保证主机的结构稳定性;
- 针对现场应用的特殊温变和抗振设计;
- 特殊算法纠正镜头和相机的畸变和误差;
- 独有标定算法设计实现设备现场一键标定。
- 可选配无线通信模块,与手持探测标靶实现同步图像采集。
- 可选配主动光源控制系统,根据测量现场限制配置主动发光标靶或被动反光标靶。
典型应用:
- 高精度空间定位系统。
- 高精度六自由度姿态跟踪。
- 机器人或机械臂坐标和姿态高精度修正。
- 机器人重复精度检测。
- 机器人与工件坐标对齐(如:机器人高精度加工和涂胶应用)。
- 机器人轨迹规划目标点位姿采集。
- 高精度动作捕捉。
- 高精度VR/AR坐标对齐。
基本功能 |
产品优势 |
|
|
设备参数
| 视觉传感器 | 标准配置2个高清相机 |
| 温度范围 | 0-40 ºC |
| 湿度范围 | 5-80% |
| 主机尺寸 | 120*180*460mm |
| 主机重量 | 3Kg |
| 主机供电 | 200-230V AC,19V DC |
| 测量物距 | 750-3000mm(可非标扩展到750-8000mm) |
| 重复精度 |
+0.003mmΔ50mm:机械夹持测量,用于景深0.75m-3m范围内位置变化小于50mm时,高重复精度位移测量和变形测量¹。 XY+0.04mm@3m,Z+0.08mm@3m:手持测量,用于0.75-3m全景深范围内较高重复精度测量和定位³。 |
| 空间精度 |
XY+0.04mm@3m,Z+0.08mm@3m:用于景深0.5-3m范围内机械夹持固定位姿测量,较高绝对空间精度三维测量4 XY+0.15mm@3m,Z+0.25mm@3m:用于景深0.5-3m范围内人工手持测量,一般绝对空间精度三维测量5 |
说明:
- 表格中¹:典型应用于小范围变形位移自动测量,如机器人重复精度检测、检具、变形测量和位移测量等。
- 表格中²:典型应用于高重复精度的在线自动化测量检测等。
- 表格中³:典型应用于较高重复精度人工测量,如加工余量测量、装配形位检测、盲装辅助导航、六自由度位姿跟踪记录和大工件平面度直线度等,需要在现场开展手持测量的场景。
- 表格中4:典型应用于较高空间绝对精度自动化测量和自动化精密装配引导等。
- 表格中5:典型应用于一般空间绝对精度人工测量,大工件加工余量测量、大工件空间三维尺寸测量检测、非标管路等需要在现场开展人工测量的场景。

